Study Kasus Multiplexer dan Demultiplexer
Institut Teknologi PLN Jakarta
Dosen : Max Teja Ajie Cipta Widiyanto, S.Kom., M.Kom
Tugas Kelompok : Sabrina Ranti Sonia (202131024)
Putri Aulia Irwan (202131015)
Study Kasus Demultiplexer
ANALISIS REDAMANTERHADAP PERFORMANCEDENSE WAVELENGTH
DIVISION MULTIPLEXING (DWDM)PADA SISTEM KOMUNIKASI
SERAT OPTIKDENGAN METODE LINK POWER BUDGET
DI PT. TELKOM PADANG (STUDI KASUS LINK
PADANG – LUBUK BASUNG)
Demultiplexer adalah rangkaian logika yang menerima satu input data dan mendistribusikan input tersebut ke beberapa output yang tersedia. Seleksi data-data input dilakukan oleh selector line, yang juga merupakan input dari demultiplexer tersebut. Powers (1999:102) menyatakan “Sistem serat optik memiliki aplikasi untuk menggabungkan sinyal optikyang terpisah atau membagi sinyal optik, yaitu multiplexing dan demultiplexing dilakukan oleh komponen optical coupler”.
Multiplexing adalah teknik menggabungkan beberapa sinyal secara bersamaan pada suatu saluran transmisi. Di sisi penerima, pemisahan gabungan sinyal tersebut sesuai dengan tujuan masing-masing disebut demultiplexing. Dalam multiplexing, perangkat yang digunakan disebut multiplexer (Transceiver/Mux).Receiver atau perangkat yang melakukan demultiplexing disebut demultiplxer (Demux).
Ryan (1997:9) menyatakan bahwa “Teknologi DWDM memanfaatkan komposit sinyal optik yang membawa beberapa alur informasi, masing-masing ditransmisikan dengan panjang gelombang optik yang berbeda ”. Dense Wavelength Division Multiplexing (DWDM) adalah suatu metoda untuk menyisipkan sejumlah kanal melalui satu serat optik. DWDM mengoptimalkan penggunaan fiber yang terpasang dan memungkinkan service baru secara cepat dan mudah disediakan pada infrastruktur fiber eksisting. DWDM menawarkan multiplikasi bandwidth bagi operator pada pasangan fiber yang sama.
Keuntungan - keuntungan dalam penerapan DWDM antara lain adalah :
a.
Penghematan penggunaan sumber
daya core optik terutama jaringan kabel optik yang hanya memiliki
kapasitas core yang kecil.
b. Kemampuan penyaluran transport network yang sangat tinggi, sehingga mampu menekan biaya investasi dan pemeliharaan perangkat.
c. Transparansi format dan bit rate (tidak merubah format/bit rate, hanya menyalurkan) sehingga penyaluran data, gambar dan suara tetap.
KOMPONEN DAN SISTEM KERJA DWDM
DWDM merupakan suatu teknik transmisi yang memanfaatkan cahaya dengan panjang gelombang yang berbeda-beda sebagai kanal- kanal informasi, sehingga setelah dilakukan proses me-multiplexing seluruh panjang gelombang tersebut ditransmisikan melalui sebuah serat optik. Sistem DWDM yang melakukan fungsi utama.

Gambar 1. Sistem Kerja DWDM
Sistem kerja dari DWDM dapat disesuaikan berdasarkan komponen-komponen DWDM dan dilihat pada gambar 2.
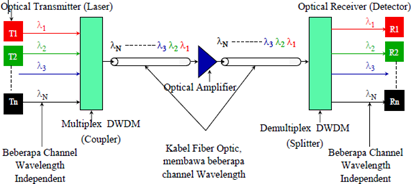
Gambar 2.Blok
Diagram Prinsip Kerja DWDM
Transmitter optik untuk sistem DWDM adalah laser-laser dengan resolusi tinggi dan ketepatan pita sempit.Laser-laser ini memungkinkan dekatnya jarak antar kanal, yang dapat menambah jumlah panjang gelombang yang dapat digunakan pada pita 1500 nm untuk meminimalkan efek ketidakcocokan isyarat (dispersi).Transmitter optik juga meminimalkan rugi-rugi daya sehingga transmisi jarak jauh dapat dilakukan.
b. DWDM Multiplexer
DWDM Multiplexer berfungsi untuk menggabungkan sinyal-sinyal transmityang mempunyai panjang gelombang berbeda-beda menjadi satu, untuk kemudian diteruskan ke satu optical fiber.
c. Optical Cable
Optical Cable berfungsi untuk menyalurkan sinyal gabungan beberapa panjang gelombang, yang datang dari DWDM Multiplexer.
d. Optical Amplifier
Penguat optik memperkuat isyarat optik untuk meminimalkan efek melalui serat optic rugi-rugi daya dan pelemahan sebagai akibat pengiriman pulsa cahaya.Teknologi penguat optik memungkinkan munculnya teknologi DWDM dengan kecepatan tinggi dan volume transmisi tinggi.Tetapi untuk jarak yang lebih pendek pada jaringan-jaringan metropolitan dan regional, penguat optik tidak harus selalu diterapkan.
e. DWDM Demultiplexer
DWDM Demultiplexer berfungsi untuk memisahkan satu sinyal gabungan beberapa lamda yang datang dari kabel serat optik, menjadi beberapa sinyal dengan lamda yang independent.
f. Optical Receiver (Detector)
Optical Receiver berfungsi untuk mendeteksi sinyal dengan gelombang cahaya yang datang dari DWDM demultiplexing, untuk kemudian mengubah dari sinyal dengan daya optik (cahaya) menjadi sinyal dengan daya listrik.
ATTENUATION (REDAMAN)
Kartalopoulos (2001:24) menyatakan bahwa “Redaman serat optik disebabkan oleh faktor intrinsik, terutama hamburan dan penyerapan, dan dengan faktor ekstrinsik, termasuk tingkat jenuh dari proses manufaktur, lingkungan, dan fisik pembengkokan”. Redaman serat optik yang menjadi parameter dalam penelitian DWDM dari segi daya terima berdasarkan ITU-T G.655 adalah :
a. Redaman Kabel Serat Optik
Keiser (2000:92) menyatakan bahwa “Redaman pada serat optik merupakan pelemahan daya dari cahaya yang ditransmisikan mulai dari pemancar sampai jarak tertentu”.Standar redaman kabel 0.22 dB/km.
b. Redaman Splice (Sambungan)
Menurut Crisp dan Elliot (2008:114) menyatakan bahwa “splice fusi adalah metode penyambungan serat optik yang memberikan hasil paling permanen dan menimbulkan rugi daya paling rendah”. Penyambungan kabel serat optik juga dapat menimbulkan rugi daya walaupun kecil dan redaman serat optik.standar redaman splice 0.15 dB untuk satu splice.
c. Redaman Konektor
Konektor ini tentu akan menambah faktor redaman yang terdapat pada sistem, faktor redaman tersebut antara lain tidak sesuainya ukuran inti serat optik yang dipasang ke konektor, rugi celah optis antara kabel dengan konektor, bahkan kotoran atau debu yang terdapat pada konektor juga dapat menyebabkan kerugian daya pada saat mengirim data dari pengirim ke penerima. Standar redaman konektor adalah 0.5 dB.
POWER BUDGET DAN RECEIVER SENSITIVITY
Menurut Agrawal (2002:192) menyatakan bahwa “Tujuan daripower budgetadalah untuk memastikan bahwadaya yang cukupuntuk mencapaipenerimaagar mempertahankankinerja yang handalselamasistemtetap hidup”. power budget menjamin agar penerima dapat menerima daya optik sinyal yang diperlukan untuk mendapatkan Bit Error Rate (BER) yang diinginkan. Receiver sensitivity atau sensitif penerima menurut ITU-T adalah nilai minimum rata-rata daya terima dari titik Rn (penerima) mencapai 1 x 10-12 BER (Bit Error Ratio). Nilai rata-rata minimum adalah besar nilai daya terima dari penerima yang berada pada level minimum dari daya kerja terkecil. Standar sensitif penerima adalah – 27 dBm atau 0,002 mW, nilai ini adalah batas daya terima serat optik pada penerima.
KERANGKA PIKIR
Gambar 3. Kerangka Pikir Penelitian
Berdasarkan Gambar 3 dapat dijelaskan kerangka pikir dari penelitian, penelitian ini dilakukan analisis untuk redaman serat optik. Redaman serat optik yang diteliti adalah redaman kabel (X1), redaman splice (X2) dan redaman konektor (X3), untuk parameter ini dilakukan pengukuran dan perhitungan secara teoritis, setelah dilakukan pengukuran dan pehitungan maka dianalisis performance DWDM, performance DWDM tersebut dilihat dari segi daya terima DWDM pada sistem komunikasi serat optik.
KESIMPULAN
Berdasarkan hasil penelitian maka dapat disimpulkan :
a. Besarnya nilai redaman/km link Padang – Lubuk Basung melalui hasil pengukuran rata- rata berada dibawah standar ITU-T 0.35 dB/km namun core 1 dan core 10 memiliki redaman/km cukup besar, walaupun nilai redaman/km core 1 dan core 10 masih berada dibawah standar ITU-T namun untuk peningkatan kualitas transmisi perlu dilakukan perawatan pada kabel yang mengalami bending loss. Kemudian untuk hasil perhitungan maupun pengukuran link power budget pada core 1, 3, 4, 9, 10, 12, 20, 23 dan 24, nilai Rx masih berada di bawah nilai Rx sensitivity (-27 dBm atau 0.002 mW), sehingga daya masih dapat diterima oleh receiver pada perangkat dan kondisinya dapat dikatakan berfungsi dengan normal.
b. Perbandingan hasil pengukuran dan perhitungan dengan persamaan ITU-T pada redaman serat optik, core 1 selisih antara pengukuran dan perhitungan sebesar 3.585 dB, core 3 selisih 3.006 dB, core 4 sebesar 3.473 dB, core 9 sebesar 2.807 dB, core 10 sebesar 1.85 dB, core 12 sebesar 4.03 dB, core 20 sebesar 3.329 dB, core 23 sebesar 1.628 dB dan core 24 sebesar 2.018 dB. Perbedaan hasil pengukuran dan perhitungan dikarenakan pada hasil pengukuran nilai redaman setiap pengukurannya tidaklah konstan.
REFERENSI